Hi all!
We are super excited about being awarded the “New Project Track” funding from GOSH’s 2022 Collaborative Development Program! (Round 1). You can find our application here.
We have also been awarded funding for phase 2 of the CDP (links: application and results).
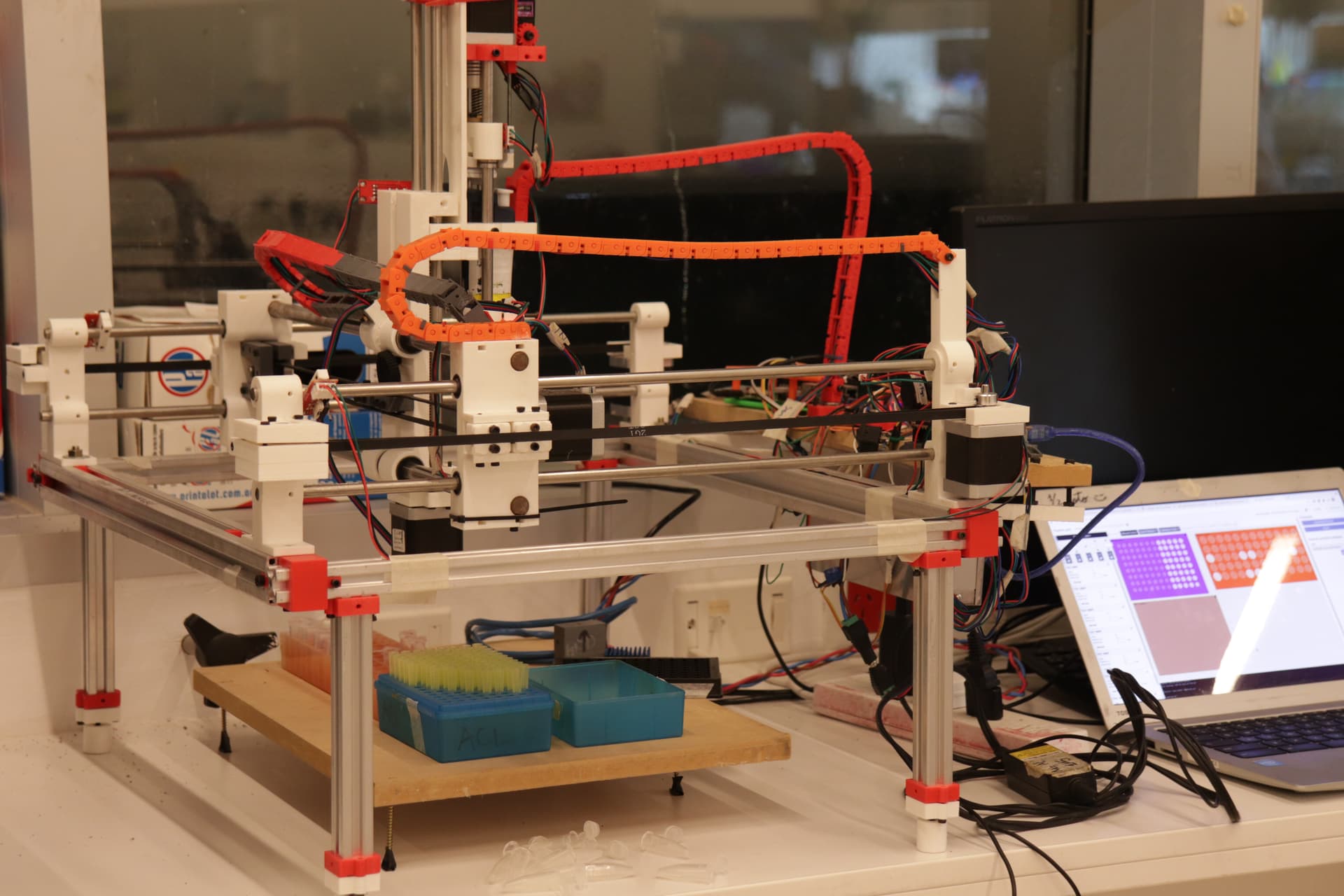
Meet our prototype robot! Demo videos available at the repo.
In this post we include the info and links to most relevant aspects of the project, and hope to encourage participation from the GOSH community ![]()
Team
Our team for this phase of the project gathers skills on molecular biology, engineering and chemistry.
Its members are:
- Nicolás Méndez @naikymen,
- Gastón Corthey & Martin Gambarotta @gcorthey @mgamba (from TECSCI),
- CDP Phase 1: Felipe and Solomon.
- CDP Phase 2: TBD.
Collaborations
Open calls for new collaborations will be posted in this forum and social media, and will focus mainly on two hardware aspects:
- Design of the enclosure, usability improvements, and tool-changing implementation (budget item 1).
- Improve the driving software (budget item 2).
- Designing a set of OScH micropipettes.
- Writing an interoperability layer between our project and the OpenTrons software.
Development
It will happen mainly on two GitLab repositoies under a common group:
- Group: Open Lab Automata · GitLab
- Project files: Open Lab Automata / Pipetting Bot · GitLab
- Project documentation: Open Lab Automata / Pipetting GitBuilding Docs · GitLab
- Project logs, discussion and management:
- On the project’s issues: Issues · Open Lab Automata / Pipetting Bot · GitLab
- On in this very thread

Objectives
We are commited to produce:
- An open hardware pipetting robot, capable of toolchanging.
- Full project documentation on its assembly, how it works, and how it was designed.
Roadmap
- Open calls for collaboration.
- Finish overall design:
- Implement tool-changing.
- Integrate turbidity measurements with the reGOSH colorimeter.
- Design enclosures, cable management, and tidyup its appearance.
- Cleanup software and write tests.
- Hardware documentation:
- Usage.
- Assembly.
- Customization and design principles.
- Software documentation: usage and customization.
Contact
We are super interested in hearing your ideas, constructive criticism and whatnot.
If you wish to contact us, please comment on this post, write to @naikymen, or drop us an issue in the main GitLab repository.
We’ll post updates as soon as they are available!
Edit (2022/08): updates for phase 1 development were posted here.

