What’s this all about?
I’m reviving my old AUV project (it was displayed at the Shenzhen gathering and mentioned in some other posts) under this more descriptive name to indicate approachability and low cost.
The aim behind this project has always been to fill a gap in the AUV (autonomous underwater vehicle) world. Unlike UAVs (aerial drones) and ROVs ((underwater) remotely operated vehicles) that exist in the USD100 form to the USD100,000 form, AUVs only exist in the upper end. Simple Sub is positioned at the sub-$1000 range. Like UAVs and ROVs, the hope is that by introducing the tech to the amateur demographic, Simple Sub can be useful in existing as well as innovative applications.
The main envisioned purpose is in situ environmental monitoring, like a roving multiparameter sonde,but as you’ll see later, other applications have been mooted.
I’ve been sending out project update via email, but I’m moving all that to the GOSH forum.
To catch up, the first update:
Hi! Just got back from fossasia in Thailand last week where I met many of you.
I’ve submitted an “expression of interest” for a Wildlabs/ARM grant. It’s only USD10k but what the hell. I came up with the name “Simple Sub: An Autonomous Underwater Drone…”. I’m quite happy with it, because no one knows what an AUV is and I want to steer it away from the technical and toward the layperson. Calling it a sub or drone I think is helpful.
One of you suggested using the AUV to probe the depth of reservoirs in Thailand. I think we can do it! There are cheap fish finders (echo Sounders) that are small enough but they will need to be hacked. With 60 Wh battery, 3 W full power for 2 knots is 40 nm or 74km for the lawnmower pattern.
Another one of you seemed interested in a chlorophyll a sensor! This will be great for monitoring harmful algal blooms, which as I see it is the killer app! Chlorophyll sensors are expensive (hundreds of dollars) compared to conductivity sensors (tens of dollars).
This was a short update on the project. These won’t be more frequent than weekly and won’t be longer than a screenful, but I’ll remove you if you want. And if you say-so, I’ll move your address to the cc list from bcc so your address will be visible. Right now there are 6 of us.
Second update:
Another quick update on Simple Sub!
I got 10 aluminium hull tubes cut, from 460mm to 540mm long. They are all OD 3" compared with the original prototype which is 3-1/2". I won’t use them all, but will choose the appropriate length so that minimal trim weight will be necessary. Each hull tube will later have 4 holes drilled in each end to secure the bulkheads. Otherwise, they are as-delivered from the hardware store. I had the tubes cut now so that I can measure them before committing to the design of the bulkheads. As it turns out, the tubes did come with thinner walls (by 0.1mm) than declared!
The other attachments are PCB layouts of the CPU board, which will take the microcontroller. The radio board will go on the forward bulkhead. It interfaces to the 2.4GHz LoRa (for Mavlink) and to GPS. The thruster board mounts on the rear bulkhea/d and will carry the thruster. The odd-angled component is a PCB from a 360-degree rotation servo, which will allow the thruster to be controlled like a servo.
Next step will be to complete the 3D model for the bulkheads (now that I have the hull tube internal diameter) and send off to have them fabricated. I will probably also include the conductivity sensor in the rear bulkhead. This is premature, but I might as well because I have found sources for the sensor and circuit both.
I had a nice conversation with one of you about the chlorophyll-a sensor.
Third/current update:
Simple Sub did not make the Wildlabs USD10k grant shortlist. It’s too bad I can’t hire anyone, but the show must go on albeit more slowly.
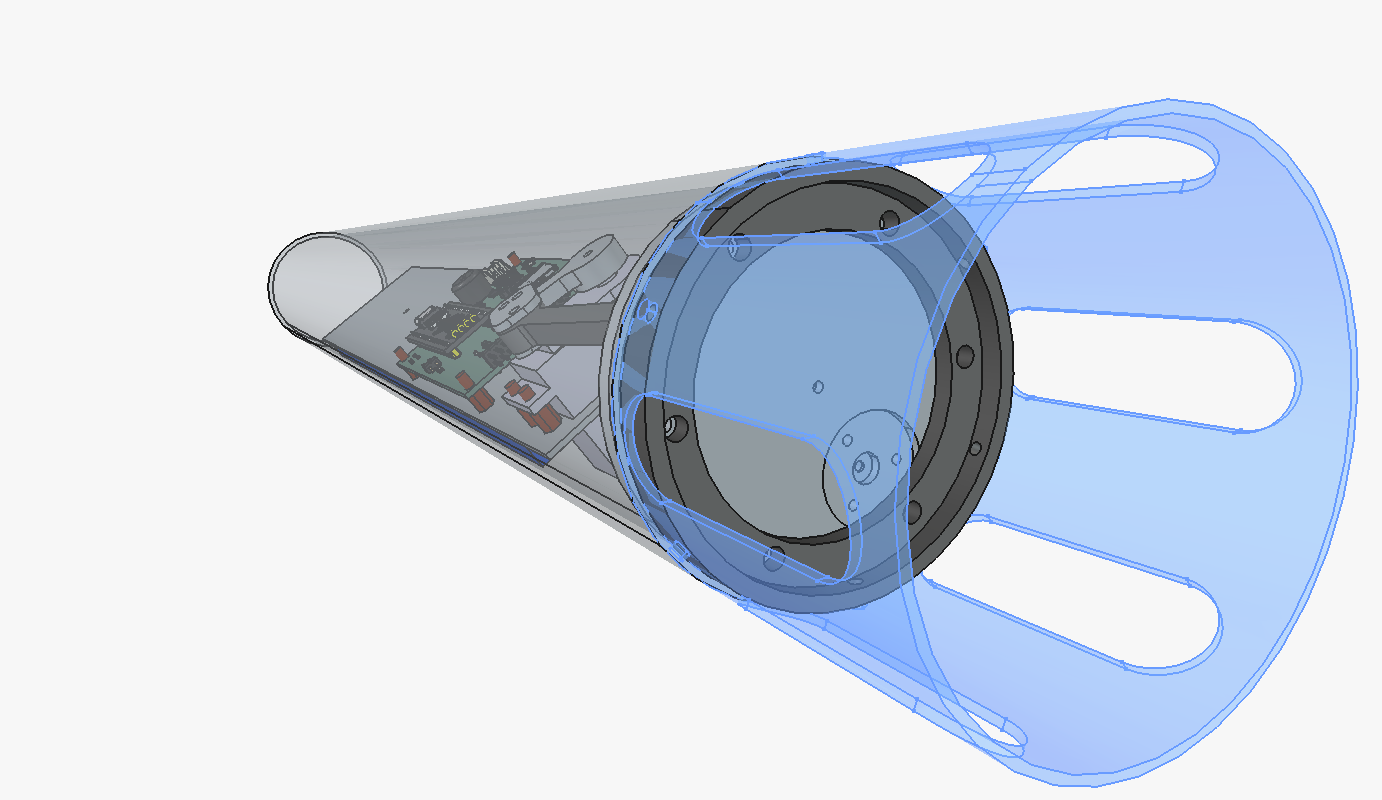
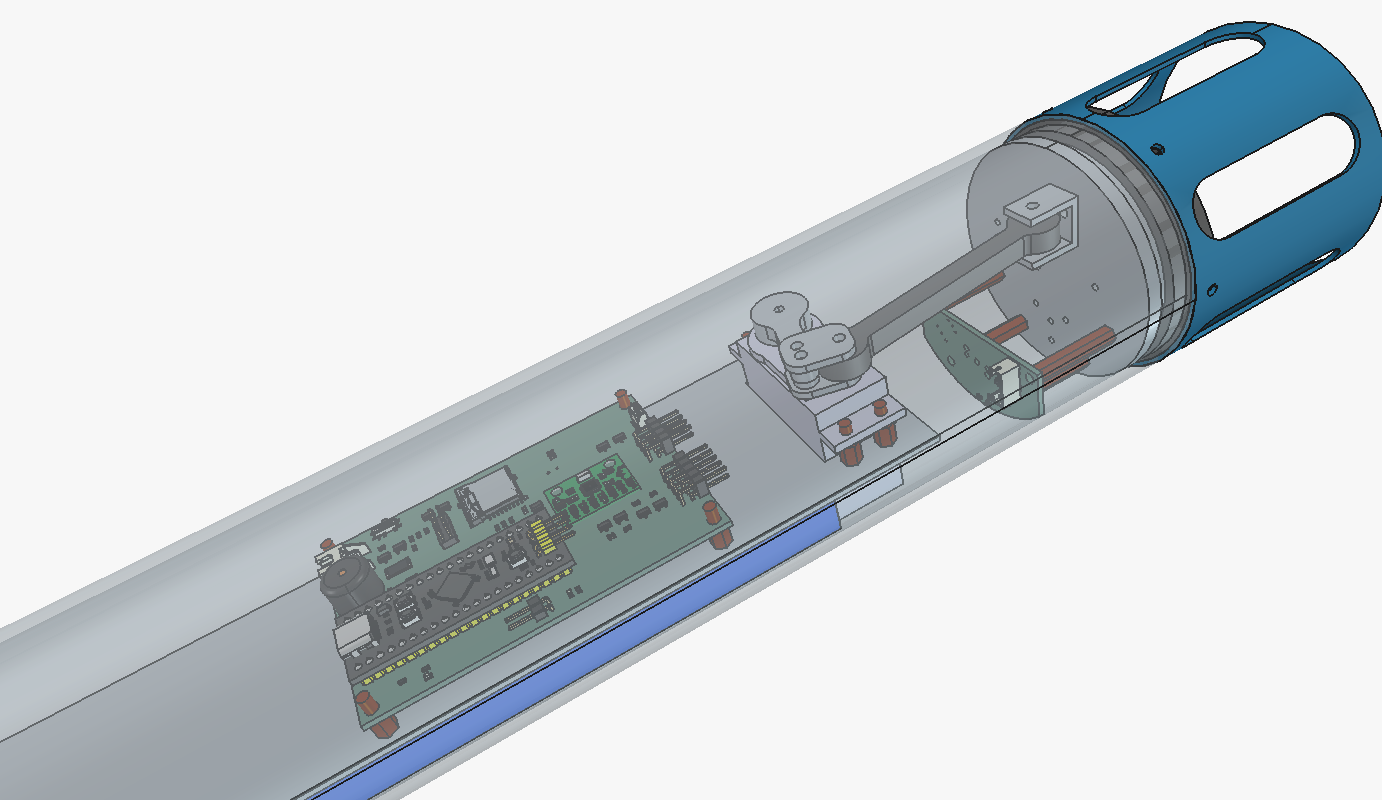
The 3D model is coming along! The front portion of Simple Sub is not yet modelled, but the first image shows the rear portion. The lipo battery is the long blue slab under the main PCB (the first spin of which is about ready for the board house). You can see the servo (mounted in a hole in the sole plate) that acts to move the inner assembly to pitch nose up or down. The thruster motor will be mounted on the small PCB whose standoffs mount to the bulkhead such that the propeller shaft goes through the bulkhead. You can see the detail for the waterproof gland for the shaft, in the second image, which also displays the real estate available on the bulkhead for sensors, which will include at a minimum, sensors for depth, temperature, and electrical conductivity. The blue cage protects them from damage but permits the free flow of water.
I had a nice conversation about an interesting project, basically an autonomous in-situ flow cytometer. This turned to taking physical samples of just a few mL each using a peristaltic pump, storing each sample in a slug in the tubing itself. This would help in the detection of HABs.