2023-03-01: Lots of updates 
Klipper software stack
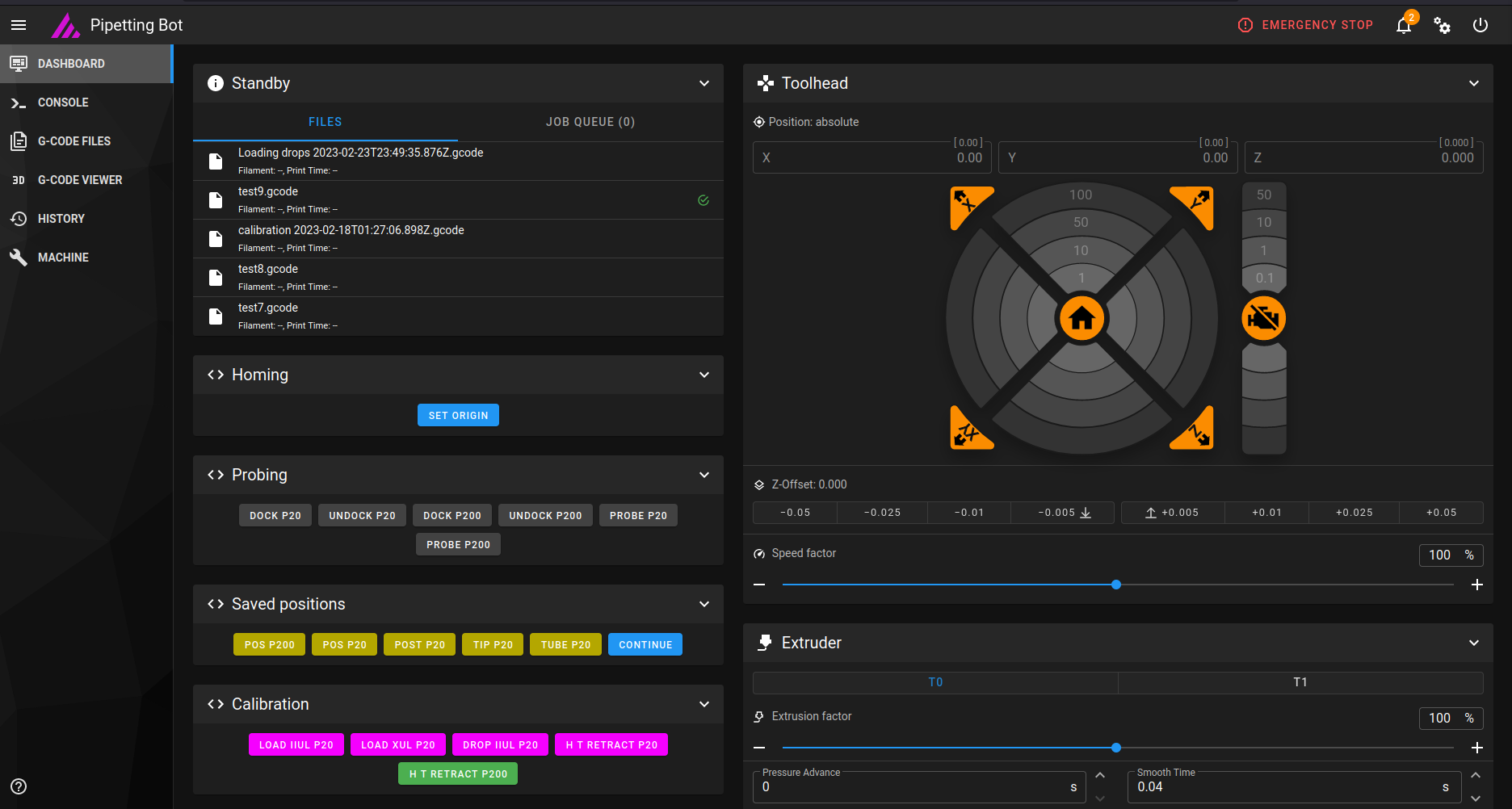
Controller interoperability for pipetting bots is now a reallity ![]()
After an insane amount of code spelunking, the Klipper fork is now working for pipetting protocols (and more general CNC really).
Also, by reurposing the Klipper-Moonraker-Mainsail stack, the robot can be used with a very slick interface, from desktop and mobile. Pre-defined protocols can be executed directly from this interface.
New collaborations:
- A small new collaboration appeared with a Canadian researcher, working on very similar stuff. They used our bot’s fork of the Klipper firmware on their own syringe-bot. More info at Jubilee’s Discord lab-automation channel.
- Just had a great chat with @scientist! We will probably collaborate on making assembly instructions for a single-pipette bot out of an Ender 3D.
Custom pipettes
The pipette seals oddysey is coming to a close.
@bserrentino is preparing the first manufacturable prototype and contacting seal suppliers.
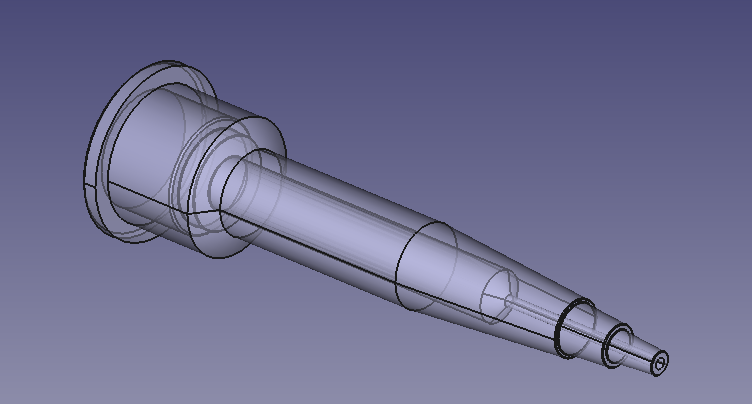
We learnt a lot about mechanical seals for “rods”, and are about to purchase PTFE seals for a 6 mm shaft (actually a regular dowel pin, thanks to @Harold for the contribution).
Help needed: If anyone knows where to purchase these hat-like PTFE seals in bulk, please let us know. The alternatives from SKF, Parker or Axia are 5 to 10 times more expensive. ![]()
The multi-tip-holder / shaft part is being resin-printed on TECSCI by Martín and @gcorthey as I type.
Interops
- The Klipper backend for PLR was on hold, until the Klipper setup was complete. I will probably use Moonraker (which is fully web-capable) instead of the bare Klipper RPC interface.
- It is possible to carry out a reduced set of tasks (see below), which would produce a minimal bridge from OT’s protocol designer to ours. We can use the JSON output from their open source protocol designer (https://designer.opentrons.com/) to produce a workspace and GCODE to run in any robot.
New GUI
The GUI is being migrated to ReactJS, by Fiqus Coop., which will make it much more hackable and maintainable.
It is cool to see others tinkering with the GUI.
In action
We’ve started using the robot for simple protocols (preparing loading-buffer drops, colony PCR preps, general aliquoting).
A new round of gravimetric calibrations was needed.
A “mix” protocol step was implemented.
Next update…
By the next update we hope to have:
- A working ReactJS GUI for designing protocols.
- A working prototype for our custom micropipette.
Stuff on hold:
- Collaboration with the Friendzymes colony-picker is rather slowly.
Other stuff in progress (SIP):
- New logos and visual identity.
- Well-plate incubator and shaker.
- PLR backend for Klipper.
- OT protocol parser for the Pipetting Bot.