Queridos GOSH friends,
We wanted to tell you (and hopefully get your feedback) about a series of workshops I’ve been co-organizing with Paz Bernaldo (@paz), in which we joined members of two vulnerable neighborhoods in Melipilla (Chile) to build open source drones. This is part of a larger project run by Paz, in which she aims to tackle local problems by experimenting and using open science and technology. The idea is that these communities learn how to use these drones, for example to document and monitor some ecological issues in their own public space. You can see some photos and videos on Instagram.

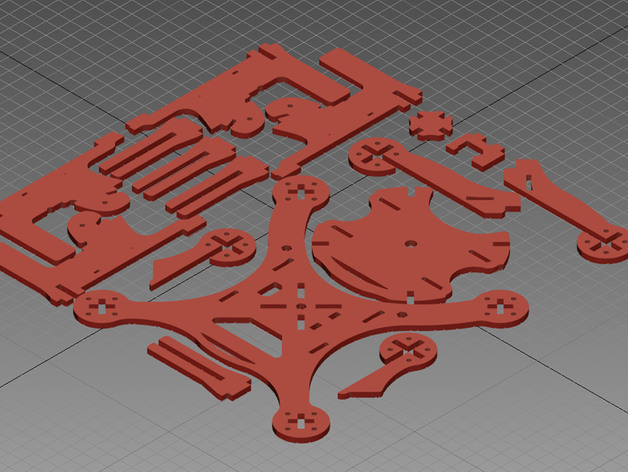
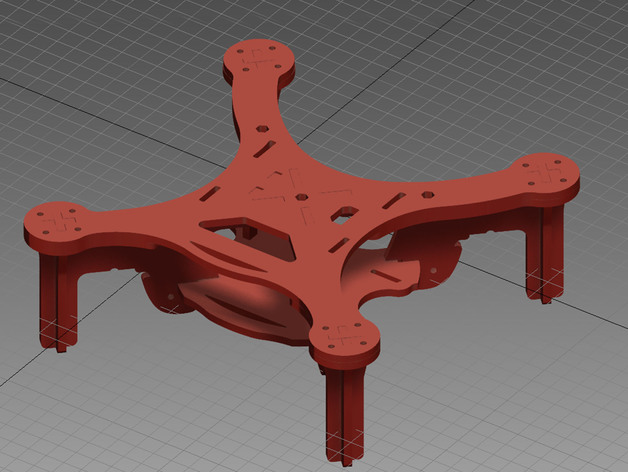
For these workshops we used an open source drone design called “Flone” (flying phone, flone.cc), which is quite easy to build, and was also quite well documented. The current documentation is in PDF in Spanish and is well designed and easy to read, but not easy to modify, and also in a wiki and an instructable in English (rather incomplete and not up to date).
One of our objective was therefore to contribute back by testing the documentation and finding ways in which it could be improved (just like we did with Richard’s microscope at GOSH). We identified some things to improve, not only technical but also the need to easily translate to different languages (we had people in the workshops who speak Spanish, English, Portuguese, French and Haitian Creole). Would anyone be up for helping translate into any of these languages?
Since documentation is the ‘source code’ of open hardware, we would like it to be easy to update, modify, but also accessible and easy to follow. Besides the text and images already available, we also shot some videos for each of the steps in the making process, which we would also like to include. Maybe we could suggest changing the documentation system to something more in line with the ‘best-practices’ that GOSH is trying to promote (as recommended in the Roadmap)… any ideas?
Another thing we would like to improve is the quality of the images that can be taken with the drone. The ‘flone’ is designed to carry a smartphone as a camera (although in theory you could try to fit any small camera). Our first tests were not great, because the vibration from the motors blurred the images a lot:
The structure of the flone is made of laser-cut plywood (it can be 3D printed too), and the phone is placed on top, held with straps and with some rubber in between. We found many examples online of vibration isolation/damping methods (e.g. this, this, and this), but we are wondering if maybe some of you have already tried them or have any recommendation, taking into account that the design should be easy to replicate with widely available materials. Ideas?

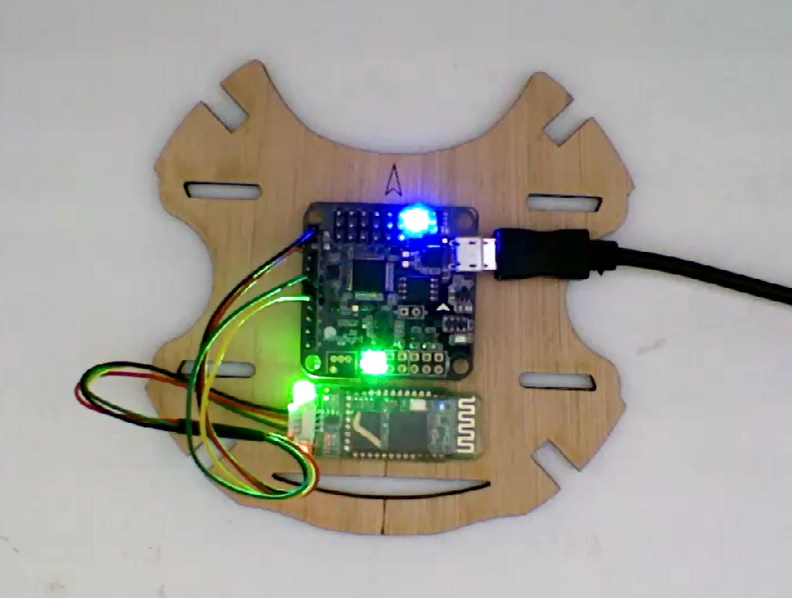
Another important aspect of the design that would need improvement is the range of the controller. The Flone is controlled using a smartphone app, which communicates with the flone via bluetooth. The range is therefore limited to about 10 meters (not too practical for aerial mapping). Before changing to a radio link, we thought we could try somehow extending the range of the bluetooth link. As usual, there are many examples online (e.g. this and this). Any recommendations about this?
And regarding potential uses of the drone: one of the local issues identified in the workshops was that there is an illegal quarry in the local hill, right next to one of these neighbourhoods. A possibility would be for the people to use the drones to take aerial images to document the activity in this quarry, ideally using some sort of (open source) software to quantify the volume of material that is being taken out. I have some experience with closed-source software for aerial image processing (Agisoft Photoscan), but we wanted to try an open source alternative called Open Drone Map. Has anyone done this kind of measurements or tried this software?

Thank you all, gracias a todos!!! 



