Día 6
Una vez presentados todos los proyectos, los participanes se distribuyeron entre las tareas disponibles y comenzamos a intentar terminar el desarrollo de varias herramientas, con vistas a llevarlas con nosotros en las salidas de campo.
Las actividades son varias y repartidas por grupos, así que otros van a comentar sobre las particularidades de lo que estuvieron haciendo,
pHímetro, turbidímetro y conductímetro.
Estas tres herramientas comparten una concenpción muy similar:
- Arduino es la base del dispositivo.
- La comunicación del dispotivo hacia un registro es via un módulo bluetooth HC-05, registramos en forma especialmente detallada cómo configurarlo.
- Planeamos controlar el procedimiento usando una aplicación android, desarrollada con Kodular.
- Vamos a desarrollar una vía de entrada para los datos a una encuesta de SurveyStack.
Conductíemtro
Intentamos detallar todos los pasos y aprendizajes que nos parecieron relevantes en la Wiki del proyecto.
Microscopio, Cámara de respiración
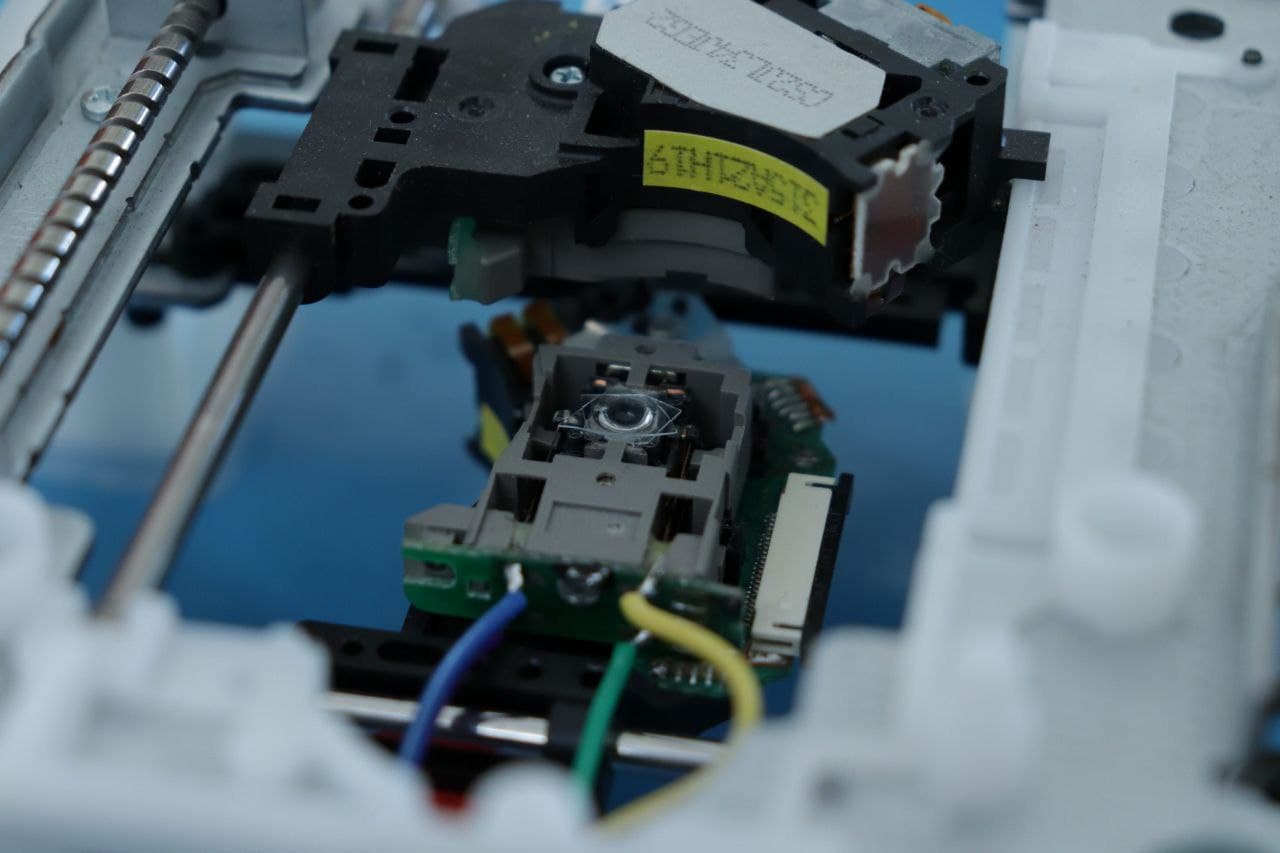
Lars’ laser scanning microscope
Lars nos mostró su prototipo de microscopio hecho con lásers de CD/DVD/Blu-Ray (llamados “optical pickup units” / OPU).
La documentación de su proyecto está en su sitio: STM32-LSM
Intentamos tomar imágenes de levaduras, para eso:
- Disolvimos 20 granos de levadura liofilizada en 40 mL de agua mineral con 2 cucharadas de azúcar de mesa (sacarosa). Mezclamos bien y dejamos reposar para que se activen las levaduras.
- Mientras tanto, limpiamos un cubreobjetos para microscopía, y lo partimos en pedacitos más pequeños. De esta forma es posible colocar la muestra directamente sobre el OPU que se usa solo como eje “Y” (no se usa la parte óptica).
- Luego pusimos un trozo de cubreobjetos sobre el lente inferior, una pequeña gota de cultivo de levaduras, y finalmente otro trozo de cubreobjetos encima. Los vidrios quedan pegados por capilaridad, pero hay que tomar fotos rápidamente, porque el líquido en el medio se evapora progresivamente por los costados. Eventualmente las levaduras se secarían, y ademá se separarían los vidrios.
- Para solucionarlo se podría sellar los costados del sandwich de cubreobjetos con esmalte de uñas.
- Luego pusimos el otro OPU encima. Esta segunda unidad es la que escanea la imagen, sobre el eje “X”, y se coloca de forma que el movimiento del lente superior sea ortogonal al del inferior.
- Usamos el script de Lars para pedirle al controlador que encuentre el foco, que se define como la posición en Z sobre la que hay un pico de intensidad de luz reflejada. Hay otro método que depende del astigmatismo en el lente que está frente al sensor, y de tomar la diferencia en intensidad de los pares de fotodiodos del sensor que están en diagonal.
- Discutimos un rato qué podríamos hacer con el proyecto durante la residencia. Una de las ideas fue adaptarlo al microscopio OpenFlexure invertido, de forma que el OPU inferior (eje Y) descanse sobre la platina, y que el OPU superior (eje X + scanner laser) se acople a donde normalmente va la cámara del raspberry. Finalmente decidimos no continuar, ya que los proyectos de Gaudi y de UC2 ya lo han logrado de forma muy prolija y efectiva: