General information
Name of the project
Open-Source Real-Time Amplification Hardware
Track (New Project Track / Established Project Track)
Established Project Track
Contact name
Francisco Javier Quero
Contact email
Proposal
Identified problem or need in OSH Community and lessons learned about this gap in Round 1
As defined in the first phase of this project, the work has focused on developing open-source real-time nucleic acid amplification test (RT-NAAT) devices for its use in cost-effective distributed diagnosis, quantitative detection of genetic elements in environmental samples or for STEAM education.
Although a decade has passed since the first open-source thermocyclers designs, RT-NAAT is still withstanding to arrive into the open-source panorama and hence, also limited its application for disease detection and management especially in low and middle-income countries (LMIC). The few existing designs (f.e, https://www.chaibio.com) still range in the order of thousands of dollars. With a decrease in price and improved accessibility, the significant impact of these technologies is vast and spread around fields such as infectious disease diagnosis, personal diagnostics, environmental or food testing and water purity analysis.
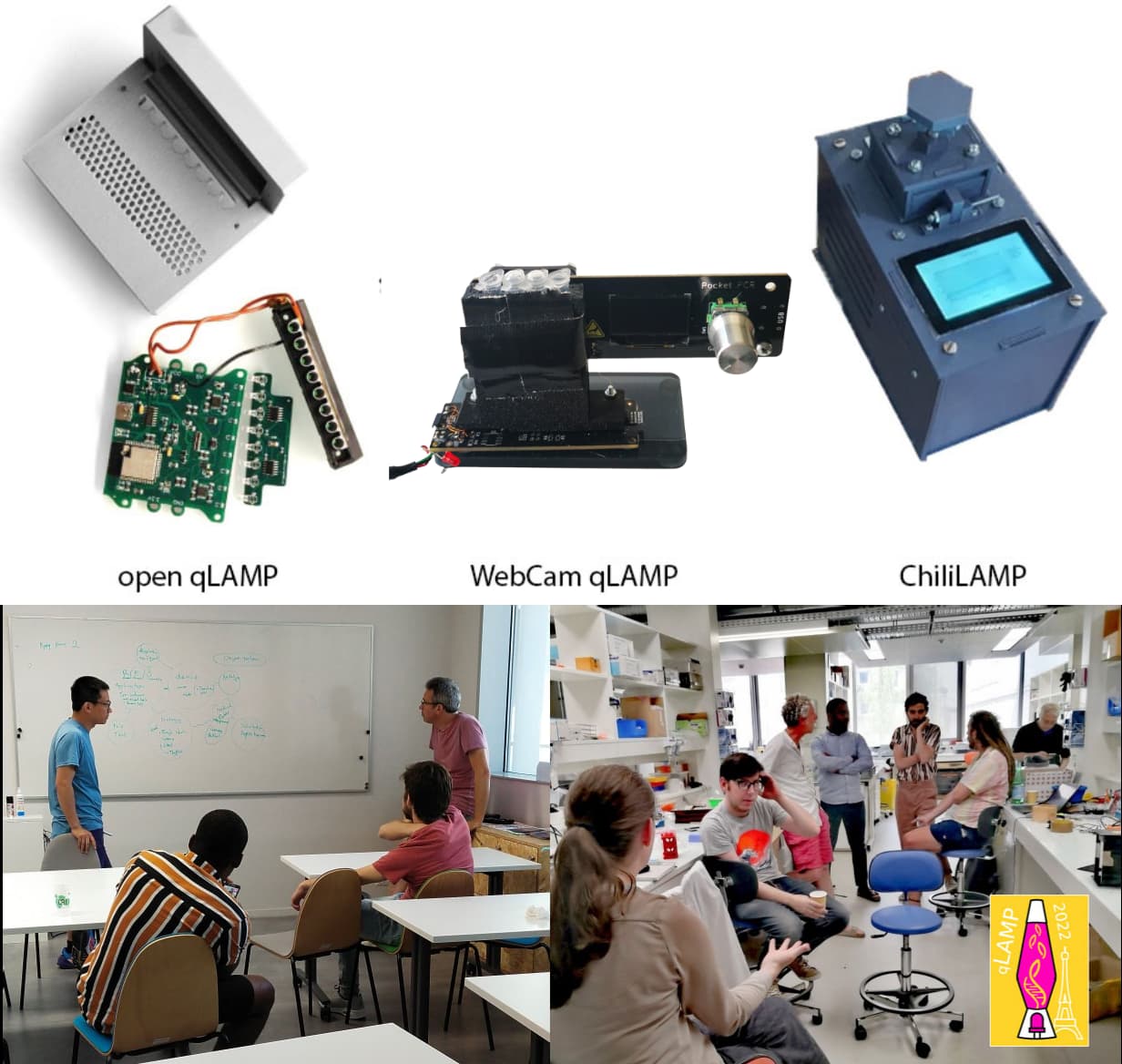
During this first round of the project, we focused on physically meeting in an experimental residence at the Learning Planet Institute (Paris), where we pooled the experience of different researchers in the field of Open-Source hardware for nucleic acid amplification. As a result, after ten days of residence, we successfully developed three functional device prototypes for Real-Time Nucleic Acid Amplification Test (RT-NAAT) that work towards the same goal employing complementary solutions. One of them, the open qLAMP, is ready for scaling the production meanwhile the other two are at the moment being refined into a final production-ready device.
The detailed output of the residence including the results and repositories of the three devices can be found in this link.
Project proposal and upgrades from Round 1
As stated in the previous section, the first round of funding has enabled us to develop three functional prototypes that performed well in laboratory tests. For the next step we plan to focus on medium-scale production and the applicability of the developed equipment in a real-world scenario. Therefore, our proposal for round two is divided into the following categories:
-
We aim to use 45% of the funding (8000$) to establish a production chain to build the first batch of devices and the necessary reaction mixes that later on will be used to test the system in the field. The reactions will be based on a variation of CoronaDetective adapted for real-time nCoV detection.
-
For the rest of the 55% funding (10000$), we propose its use to transport researchers and materials to Mboalab (Yaoundé, Cameroon) as well as its maintenance for one week. As explained later the goal of this residence is triple; Establishing a distributed production network, carrying out user training and device validation and performing user discovery.
User profile and/or market and lessons learned about end-users in Round 1
The applications, and therefore the user profiles, are divided into three categories; Research Education and Diagnosis (RED):
Research: The devices currently on the market to perform RT-NAAT cost above $10,000 (quantitative thermocyclers) or $5,000 (RealTime LAMP incubators). The RT-NAAT devices developed during this project provide a robust alternative with a significantly lower price (30-80€ to produce / 200-400 for the assembled device). Additionally, as the designs are open source, the technology is easy to replicate, without any black-boxes and adaptable for other use cases. Therefore, the local research centres in resource-constrained regions represent a potential market where this project can have a positive change.
Education: As new technologies are coming to light, what used to be cutting-edge technologies are nowadays the basis on which many applications are built, all broadly spread in our daily life. Nucleic acid amplification, a technology previously reserved for university courses, is now being explained in high school classrooms. Unfortunately the budget required to offer the students hands on these technologies is still too high for the vast majority of schools. The decrease in price and the simplicity of use of the designed devices make the entry budget to experiment with nucleic acid amplifications within reach of more and more centers. Therefore, high schools and other educational centers with limited budgets also represent a potential market where this project can have a positive change.
Diagnostics: The state of diagnostics at the global level is centered in highly industrialized areas, both in terms of the employ of diagnostic technologies and their production. Even within the regions of the LMICs themselves, the tests that are performed are centralized in a few laboratories distributed throughout the capitals and large cities, leaving the remote areas out of reach. The systems we have designed are intended to be used in small local clinics, where even stable electricity is not a guarantee. We have also put particular interest not only in establishing production-ready designs but also including local partners in the development process to help us understand the needs of LMICs and to use this technology to build local production and distribution networks. Therefore, small local clinics in remote and resource-limited settings also represent a potential market where this project can have a positive change.
Current state of the project (idea or prototype) with focus on progress done in Round 1
We have successfully gathered in Paris. It has allowed, among other things:
- Strengthen collaborative relationships through a week of collaborative experimentation.
- Reverse engineer commercial machines to study the technologies used for RT-NAAT, acquiring knowledge about these devices’ state of the art.
- Design three functional prototypes of open source solutions for RT-NAAT.
- Benchmark the different nucleic acid detection prototypes, studying each design’s pros and cons.
- Discuss and plan how to best implement a decentralized production network of diagnostic hardware and wetware.
- Discuss how to bring this technology to an impactful application, including the debate on new targets and how to perform a well-designed user discovery process.
The detailed output of the residence including the results and repositories of the three devices can be found in this link.
Each of the resulting designs from the residence has reached the following phases:
Open qLAMP: Version 1.0 is finished and ready for production, having already generated the first Real Time LAMP amplification for fungal infections in chestnut trees and SAR-CoV-2 detection. Prototypes of version 1.1 are being produced. Repository.
WebCam qPCR: The different modules have been successfully tested during the residency, generating impressive results in sensitivity and price. It is one of the most promising solutions but needs to move from the prototyping phase to having a final product ready for production. Wiki.
Chili qLAMP: There is a working prototype and assembly instructions. The machine has excelled in sensitivity among the three solutions. However, it is still necessary to adapt for large-scale production lower production costs and calibrate the sensitivity ranges Repository.
Team Description (Per member: Name, Role, Motivation, Experience). Please, highlight the new members in Round 2.
Cameroon residence trip host
Name: Stephane Fadanka, Beneficial Bio. Role: Host at Mboalab. Study applicability in Cameroon. Experience: Stephane Fadanka is Executive Director at Mboalab and works with Beneficial Bio and Open Bioeconmy Lab to make research tools and protocols more accessible to researchers in Cameroon and abroad through local manufacturing of reagents for molecular biology research and application. Stephane is also a SynBio Africa Emerging Leader in Synthetic Biology and Biosecurity fellow and a fervent advocate of Open Science sharing his experience as an Outreachy mentor and Open Science Ambassador with the Open Life Science Science (OLS-5) program. Stephane is a new member in Phase 2.
Applicability
Name: Harry Akligoh Duplex, Bio Role: Study applicability in Ghana. Experience: Harry leads Duplex Bio, a Limited By Guarantee (LBG) company in Accra, Ghana, that researches, and builds biotechnologies and products for grand challenges like Antimicrobial Resistance in Africa. Through his work with the Open Bioeconomy Lab, he co-founded the Hive Biolab in Kumasi, Ghana to pilot the production of open source enzymes and develop open educational resources to teach young students and researchers in Ghana. He has been a co-organizer of AfricaOSH and helped to democratise DIY Bio and Open Science Hardware in Africa.
Hardware production
Name: Urs Gaudenz, Gaudilabs. Role: WebCam qPCR design, production and application. Experience: Urs is an international reference in open-source laboratory hardware. His designs were the pioneer of the movement, laying the foundations that inspired many of the designs that exist nowadays, a decade later.
Names: Boris Oróstica & Fernan Federici, Lab de Tecnologías Libres Role: Chili qLAMP design, production and application. Latin America enzyme production node. Experience: Fernan Federici leads the Laboratorio de Tecnologías Libres, a reference in South America in decentralised reagents production and OpenSource Hardware. Boris Oróstica is an electrical engineer who works with this lab to design open source solutions that meet the needs of researchers. Boris is the designer of Chili qLAMP, one of the three devices tested during round 1.
Name: Fran Quero, Learning Planet Institute Role: open qLAMP design, production and application. LAMP reactions design and testing. Experience: Fran have being engaged in the creation of numerous DIYBio communities, from a BioMakerspace in Madrid (BioCrea), the initial two igem teams of the city, or one experimental biohacking at tsinghua university (Bio-X-Lab, Shenzhen). Professionally his career is centred on open source distributed diagnostic platforms,currently working at the Learning Planet Institute where he co-coordinates the DNA detective research project.
Reagents production
Name: Nur Akbar Arofatullah, LifePatch & Widya Life Science. Role: South Asia enzyme production node Experience: Akbar is working at the Faculty of Agriculture, Universitas Gadjah Mada, Indonesia as a researcher and lecturer in the field of agricultural microbiology and biotechnology. He is also the co-founder of Lifepatch (lifepatch.id), citizen initiative in art, science and technology. Akbar is interested in the dissemination of Do-It-Yourself (DIY) biology, heis working on the Introduction RT-LAMP for COVID-19 detection, and the local manufacture of the reaction mixes through establishment of a biotech research company PT. Widya Lifescience/Widya Technology Hayati. Akbar is a new member in Phase 2.
Other members of the community
Name: Chinna Devarapu (Ireland) Role: Suggestions on optoelectronics for LAMP hardware Experience: working on a number of DIY hardware devices for biological applications such as LAMP assays. His background is in photonic devices, particularly in nanophotonics which he would like to apply for biological applications.
Project objectives, expected results, and potential limitations for Round 2
Project objectives and expected results
Design of final devices and reaction mixes with insights from Phase 1
Building upon the success of prototyping results of a new Open Source RT-NAAT hardware in Phase 1, we aim to use Phase 2 to consolidate a final production-ready design and assemble the first batch of devices. This process will allow us to have an accurate estimate of production times and cost. As a result, we expect to have a final and well-documented Open Source design with a solution to scale the production
Field trip to Cameroon. Establishing a distributed production network, carrying out device validation and working on user discovery.
Phase 2 will allow a new collaborative time to engage with the OsH community through active collaboration and knowledge sharing. We plan to gather just right before the AfricaOSH conference in Cameroon at MboaLab. The residence will be used as a platform to test the field applicability of our new RT-NAAT hardware in Research, Education and Diagnostics (RED) Additionally, during this time, we will focus on formalising a distributed collaboration network to produce the different materials and assemble the components locally into a final product. Finally, during the residence, we will perform market studies to find potential stakeholders interested in exploring the use of our Open Source Hardware to build business use cases.
The new meetup will be organized one week before AfricaOSH and will take place at MboaLab. Therefore, apart from spending the week experimenting with the RT-NAAT hardware, the residents will be able to help the AfricaOSH organisers prepare for the event after the meetup. Furthermore, as a part of the funding will be used to transport the participants to Cameroon, it will allow the AfricaOSH organisation to offload these costs, allowing them to help other participants to get to the country.
Potential limitations and measures to minimise the impact
Implementation barriers due to the strict regulation of in vitro human diagnostics: Even though the initial amplifications have been carried out with SARS-CoV-2 detection reagents, the scope of this grant is not to bring a fully certified nCov test to market, but to develop a cost-effective open source technology that future entities can use to develop a new certified test. The residence at Cameroon will help to address this goal by allowing us to generate field data that later on can be used by the community to seek for funding to continue with the certification process.
The demand of nCov detection is decreasing: As the pandemic ends, the need for inexpensive tests for SARS-CoV-2 screening decreases. Hence, one of the key activities to be undertaken in Cameroon is a market study to identify other key targets that could have a bigger potential applicability. Preliminary studies during phase one showed Typhoid fever and Malaria as promising targets, but we are also considering non-human health related targets (agricultural, water testing…) as they are much less regulated. We count on additional funding sources and the 5 years experience of the Learning Planet Institute developing new primer sets for LAMP for the primer set-development.
Visa validation and vaccination in time for the trip: Due to the flexible nature of this program, we do not have plenty of time to prepare for the trip to Cameroon. Therefore, the successful arrival of all members to the region will be conditioned by external factors such as visa requirements to enter the country.
Gantt chart (Milestones, tasks, deliverables, responsible, time frames) - A link must be shared - File format: Calc, Excel, PDF, or any Gantt tool
Chart in Notion: Notion
Budget (Bill of materials and other resources) - A link must be shared - File format: Calc, Excel, or PDF
| Cost category | Details | Unitary Cost | Quantity | Estimated total cost |
|---|---|---|---|---|
| Travel cost | Travel to Mboalab for the 7 days residency | |||
| Europe to Yaounde flights | 950 | 2 | 1900 | |
| Asia to Yaounde flights | 1600 | 1 | 1600 | |
| Latin America to Yaounde flights | 1600 | 1 | 1600 | |
| Ghana to Yaounde flights | 1000 | 1 | 1000 | |
| Hosting | ||||
| Food & accommodation | One week of food and accommodation in Yaounde one week | 400 | 7 | 2800 |
| Transportation inside Cameroon | Bus, taxis, gas… To move across the region. | 300 | 300 | |
| Additional workshop materials | ||||
| Fast prototyping materials | ||||
| (3D printing filament & acrylic) | ABS and PLA printing filament for fast prototyping at Mboalab | 200 | - | 300 |
| Lab consumables | Supply of pipette tips, tubes, eppendorfs… | 300 | - | 300 |
| Shipment of materials | Transportation of materials to Yaounde | 200 | - | 200 |
| Total Mabolab conference | 10.000 | |||
| Hardware & wetware production | ||||
| Production of first hardware batch | PCB production and assembly, case printing… For producing the first batch of devices to be tested and deployed during the trip. | 3000 | - | 3000 |
| Production of first CoronaDetective reactions batch | Production of the first batch of lyophilized RealTime-CoronaDetective reactions to be deployed and tested on the field. | 4460 | - | 4460 |
| Total first batch production | 7.460 | |||
| Overheads (3%) | 540 |
BONUS: Link to the public project repository
The detailed output of the Phase 1 residence including the results and repositories of the three devices can be found in this link.
The repositories/wikis of the different equipment:
- Open qLAMP: Repository.
- WebCam qPCR: Wiki.
- Chili qLAMP: Repository.